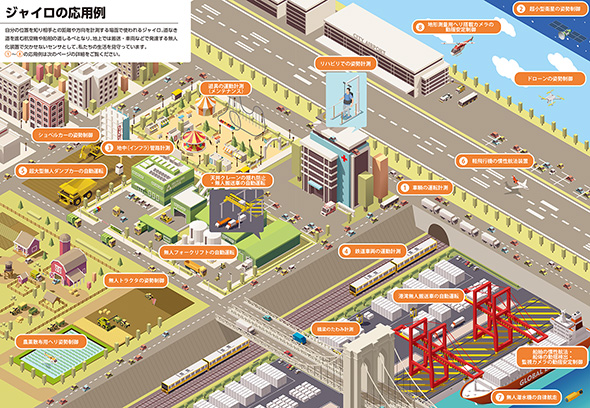
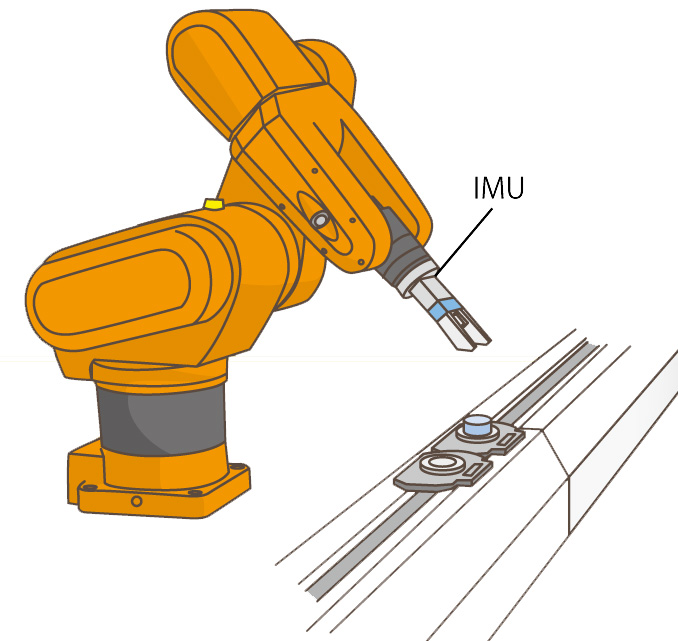
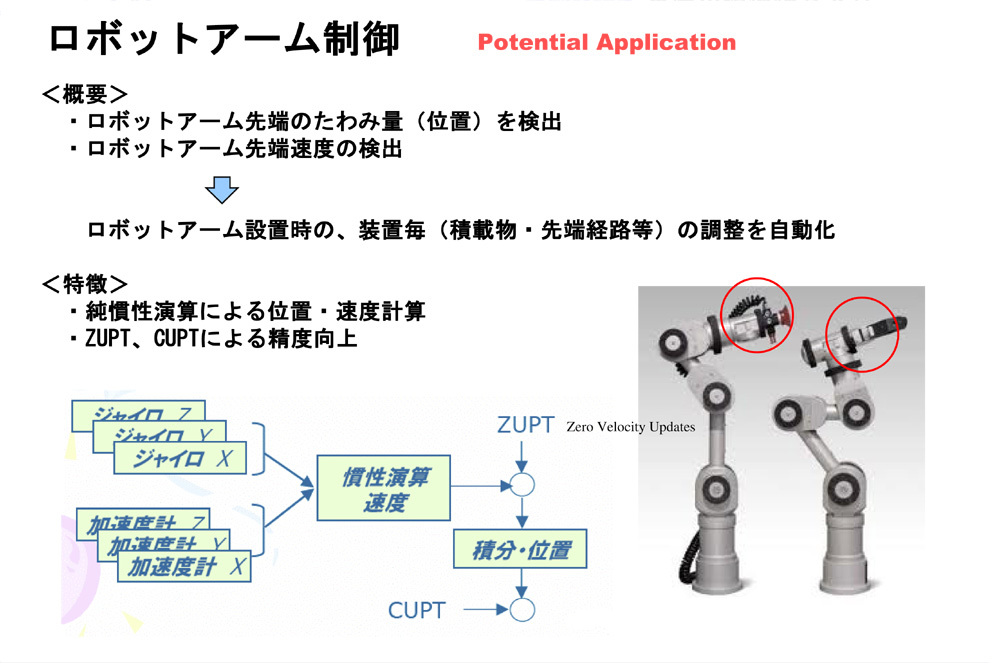
ロボットアーム先端のたわみ量(位置)、速度を検出し、設定時の、装置毎(積載物・先端経路等)の調整を自動化できます。
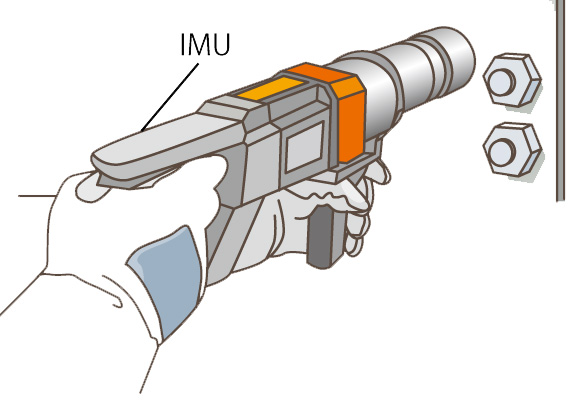
ナットランナーの位置を検出することでネジの締め忘れを防止することができます。
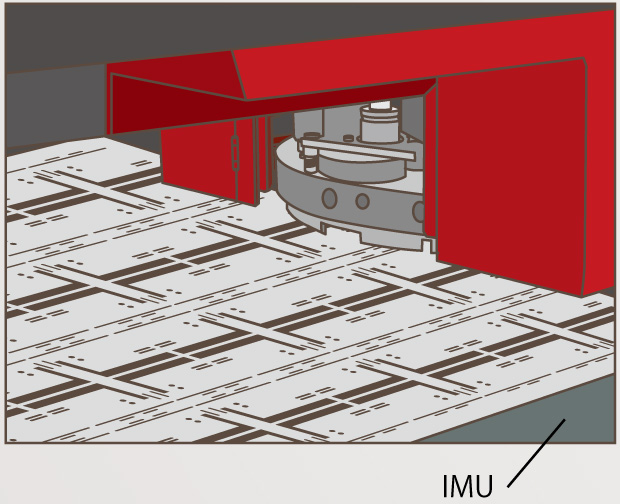
工作機械などの被切削物の微小異常振動は、回転運動を伴うこともあるため、加速度計よりもジャイロの方が多くの場合抑制に効果的です。
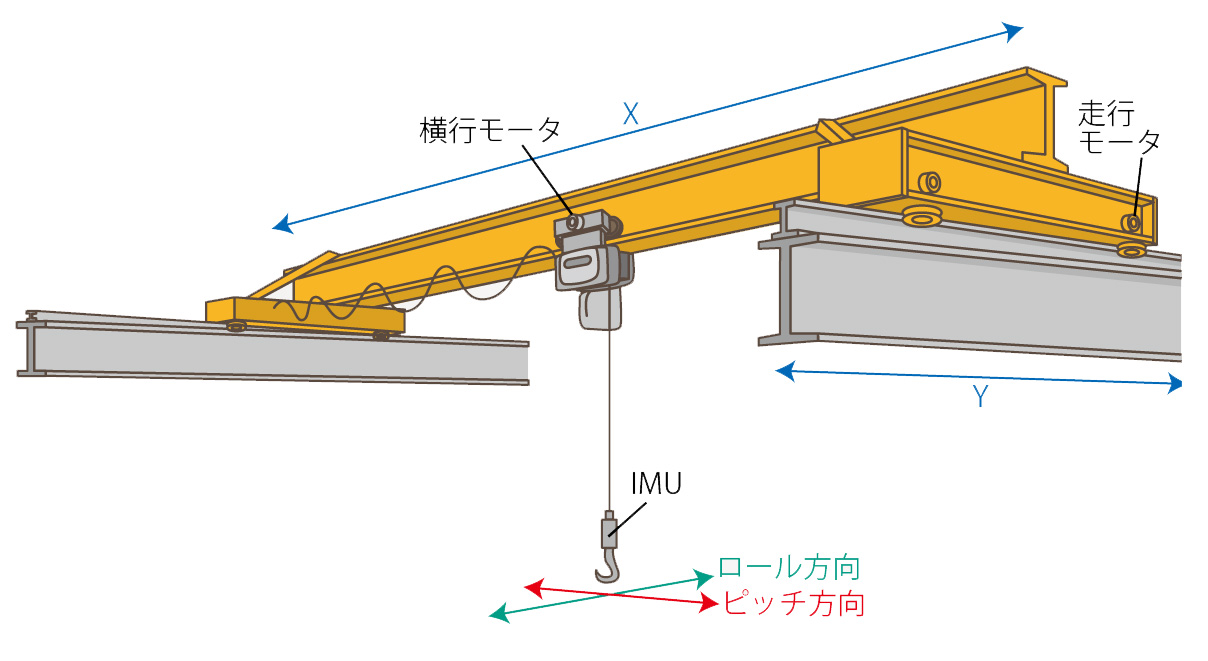
走行、横行で生じるクレーンフックの×、Y軸方向の振れ角を、角速度と加速度検出、演算回路を通して最適に制御します。
走行時、車体の挙動(ロール、ピッチ、ヨー方向の運動)を計測します。
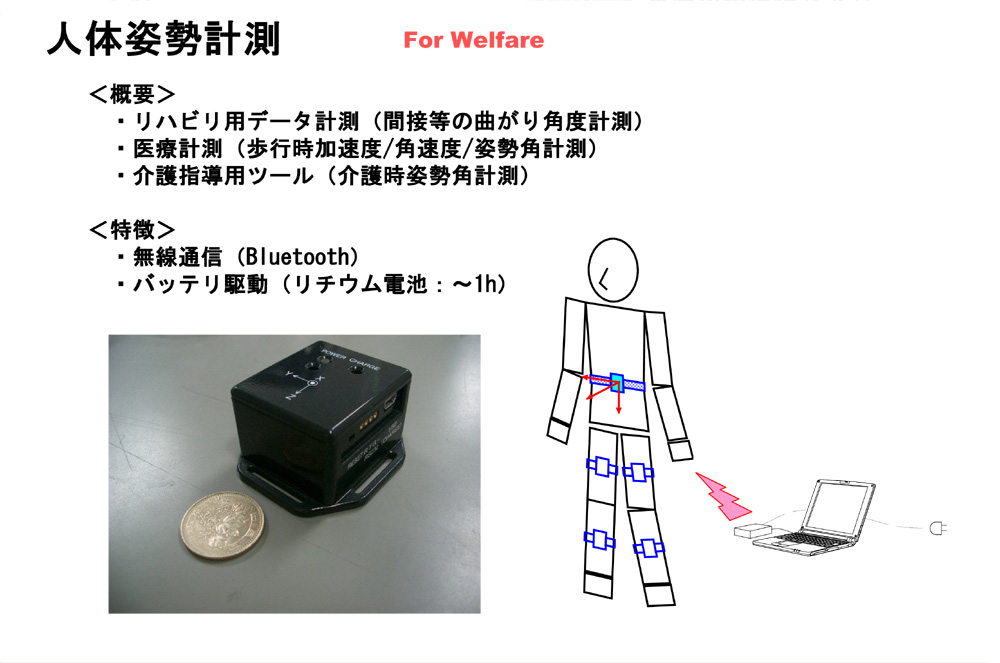
シンプルなシステムで被験者に負担の少ない無線タイプのIMUを使用することで、場所を選ばずに計測が可能になります。 ・リハビリ用データ計測(間接等の曲がり角度計測) ・医療計測(歩行時加速度/角速度/姿勢角計測) ・介護指導用ツール(介護時姿勢角計測)
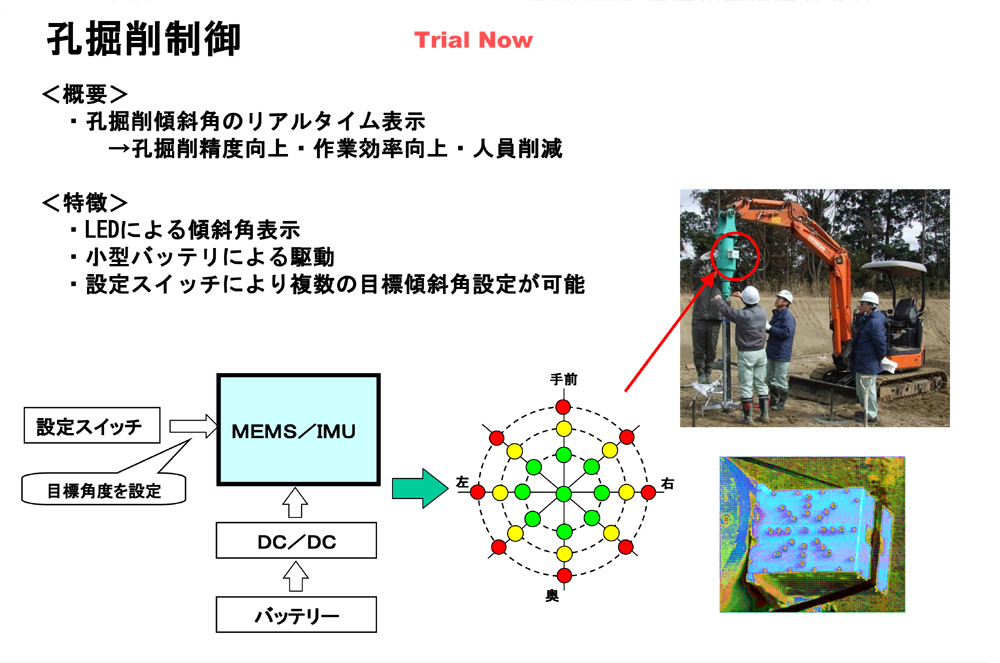
ブルドーザーなど振動している建機でも、加速度計とジャイロの両方のセンサで計測するので、正確な傾斜を測ることができます。
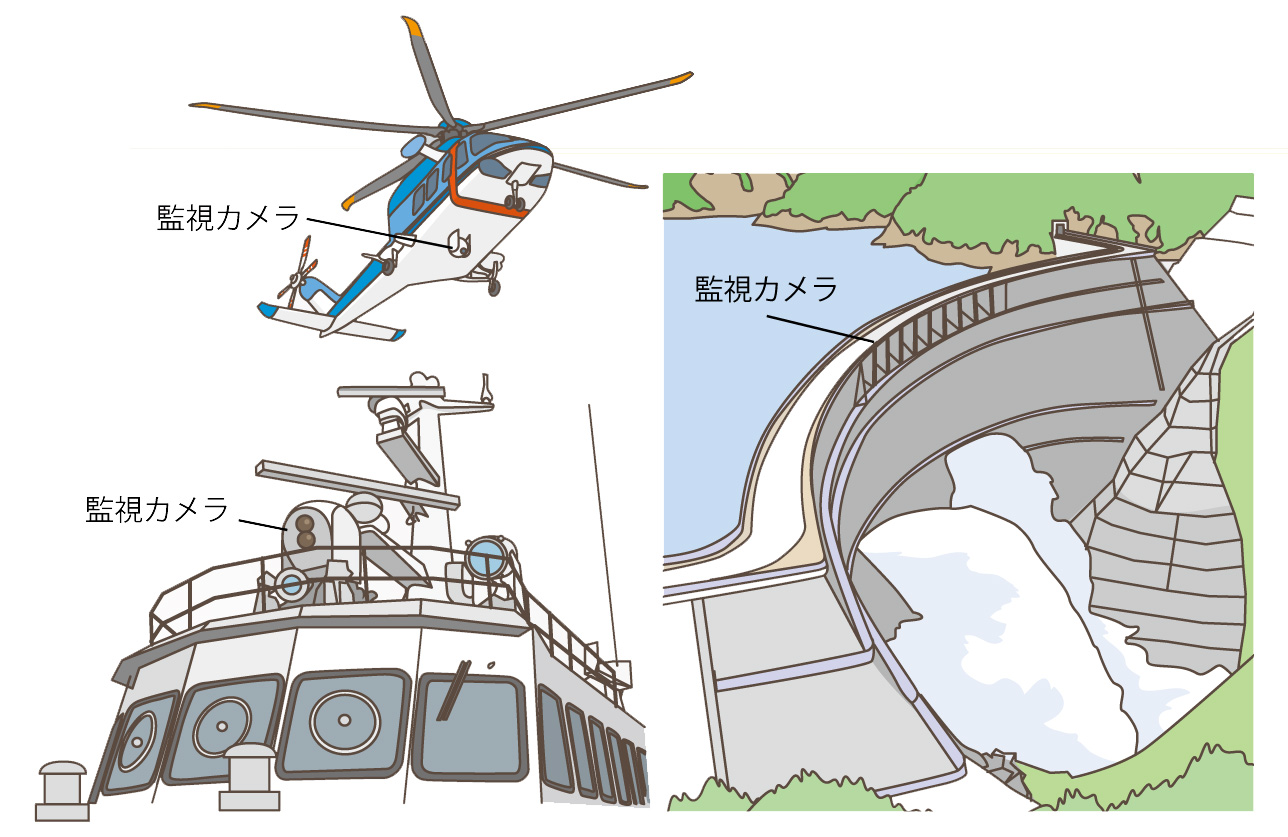
河川、ダム、海上、上空など様々な場所に設置、搭載されている監視カメラの姿勢制御にIMUが使われています。